










027.R14. Robotic Bats Fly

Robotic Bats Fly, Flexing Their Tiny Metal Muscles Researchers are making robotic surveillance bats complete with metallic muscles and shape-memory alloys. What could be more effective and potentially terrifying than spying on your enemies with robot bats? That what researchers at North Carolina State were thinking when they started working on creating robotic versions of […]
027.R13. Chiroptera

Los quirópteros o murciélagos (Chiroptera) son un orden de mamÃferos placentarios cuyas extremidades superiores se desarrollaron como alas. Son los únicos mamÃferos capaces de volar,se han extendido por casi todo el mundo y han ocupado una gran variedad de nichos ecológicos diferentes. Desempeñan un papel ecológico vital como polinizadores y también desarrollan un importante papel […]
026.R12. S5 Snake Robot Prototype

S5 Snake Robot Prototype (1998-99) Materials: Polycarbonate plastic, brass rod, and vinyl claddingComponents: One Basic Stamp II microprocessor (20 MHz), One Scenix Microprocessor (50 MHz), 64 servos, 8 servo control units, 42 batteries, 4 channel radio control. S5 represents a refinement of the S3 design. Parts were created using a numerically controlled milling machine. This […]
025.R12. S7 Snake Robot Prototype
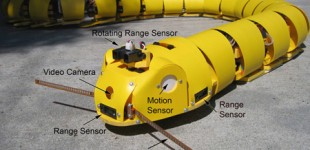
S7 Snake Robot Prototype (2001-2005) Materials: Expanded PVC plastic, steel rod, and plastic gears S7 is an experimental prototype that is still under development. It was inspired by a Dr. Miller’s encounter with a python. In particular it avoids using wheels to achieve locomotion by implementing a more advanced segment design. This allows for rectilinear […]
024.R11. Edubot

Edubot is a bio-inspired six legged robot that rotates compliant C-legs in a tripod fashion to produce energetic running gaits. A PD controller at each hip controls the leg’s angular position and speed which are governed by a periodic function known as the Buehler Clock. Careful gait tuning can lead to very fast and efficient […]
023.R10 HyDRAS

HyDRAS: Hyper-redundant Discrete Robotic Articulated Serpentine. Unique snake-like robot that utilizes a new way of locomotion to climb pole or scaffolding structures. Rolls up pole structures while maintaining a helical shape. Dynamically adapts to its surroundings. Utilizes universal joints to actuate multiple link segments. Goals & Objectives: Develop a helical backbone curve that can describe […]
022.R09. Cinética
 inética, deriva del vocablo griego (kinesis). Significa movimiento o el acto de mover. Puede referirse a: Ciencia Cinética enzimática Cinética y Mecanismos de Reacción. En FÃsica, es una rama de la Dinámica. TeorÃa cinética EnergÃa cinética: La energÃa cinética de un cuerpo es una energÃa que surge en el fenómeno del movimiento. Está definida […]
021.R08. ChIMERA
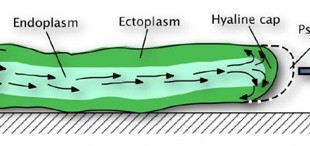
ChIMERA, el robot que se mueve como una amebaCategorÃa: Noticias | 15 de Febrero del 2010 El Profesor Dennis Hong y su equipo del Laboratorio de Robotica y Mecanica del Virginia TechSi a presentado un nuevo modelo de locomoción para robots sin utilizar motores, patas o ruedas.Han desarrollado lo que ellos llama “whole-skin locomotion (WSL) […]
020.R07. STriDER

STriDER, a three-legged walking robot. In a short article, New Scientist reports that researchers at Virginia Tech University have developed a tripedal experimental robot. With its three legs, this robot, named STriDER — short for ‘Self-excited Tripedal Dynamic Experimental Robot’ — is actually more stable than 2- or 4-legged robots. As said another researcher, ‘It’s […]
019.R06. IMPASS

IMPASS: Intelligent Mobility Platform with Actuated Spoke System http://www.me.vt.edu/romela/RoMeLa/Robots.html http://www.youtube.com/watch?v=16w7i41f7hA Este robot lleva 2 años desarrollándose, y actualmente muestra sus habilidades de forma excepcional. El IMPASS es un autómata que utiliza un sistema de radios para caminar sobre cualquier tipo de obstáculo. Estos brazos radiales se adaptan según la distancia de la superficie gracias a […]
018.R05. Inteligencia de enjambre

Inteligencia de enjambre La inteligencia de enjambre es una rama de la Inteligencia artificial que se basa en el comportamiento colectivo de sistemas descentralizados y auto-organizados Los sistemas de inteligencia de enjambre están constituidos tÃpicamente de agentes simples que interactúan entre ellos y con su ambiente. Los agentes siguen reglas simples y, aunque no existe […]
017.R04. Rovio

Easily control Rovio remotely 24/7 from anywhere in the world with an internet connection. Use any web-enabled device: PC or Mac, cell phone, smartphone, PDA or even your video game console. Rovio detects your computer settings and guides you through the setup process. Its head-mounted moveable camera and wide range of vision enable you to […]